网上关于 PyTorch-Kaldi 的介绍多停留在论文翻译,很难得在李理的博客里看到例子的运行和脚本的详细说明,以下附上原文内容并附上少量注解。
本文转载自 李理的博客
本文介绍 PyTorch-Kaldi。前面介绍过的 Kaldi 是用 C++ 和各种脚本来实现的,它不是一个通用的深度学习框架。如果要使用神经网络来梯度 GMM 的声学模型,就得自己用 C++ 代码实现神经网络的训练与预测,这显然很难实现并且容易出错。我们更加习惯使用 Tensorflow 或者 PyTorch 来实现神经网络。因此 PyTorch-Kaldi 就应运而生了,它使得我们可以利用 Kaldi 高效的特征提取、HMM 模型和基于 WFST 的解码器,同时使用我们熟悉的 PyTorch 来解决神经网络的训练和预测问题。阅读本文前需要理解 HMM-DNN 的语音识别系统、WFST和Kaldi的基本用法。
架构
前面我们了解了 Kaldi 的基本用法,Kaldi 最早设计是基于 HMM-GMM 架构的,后来通过引入 DNN 得到 HMM-DNN 模型。但是由于 Kaldi 并不是一个深度学习框架,我们如果想使用更加复杂的深度学习算法会很困难,我们需要修改 Kaldi 里的 C++ 代码,需要非常熟悉其代码才能实现。而且我们可能需要自己实现梯度计算,因为它不是一个 Tensorflow 或者 PyTorch 这样的框架。这样就导致想在Kaldi里尝试不同的深度学习(声学)模型非常困难。而 PyTorch-Kaldi 就是为了解决这个问题,它的架构如图下图所示,它把 PyTorch 和 Kaldi 完美的结合起来,使得我们可以把精力放到怎么用 PyTorch 实现不同的声学模型,而把 PyTorch 声学模型和Kaldi复杂处理流程结合的 dirty 工作它都帮我们做好了。
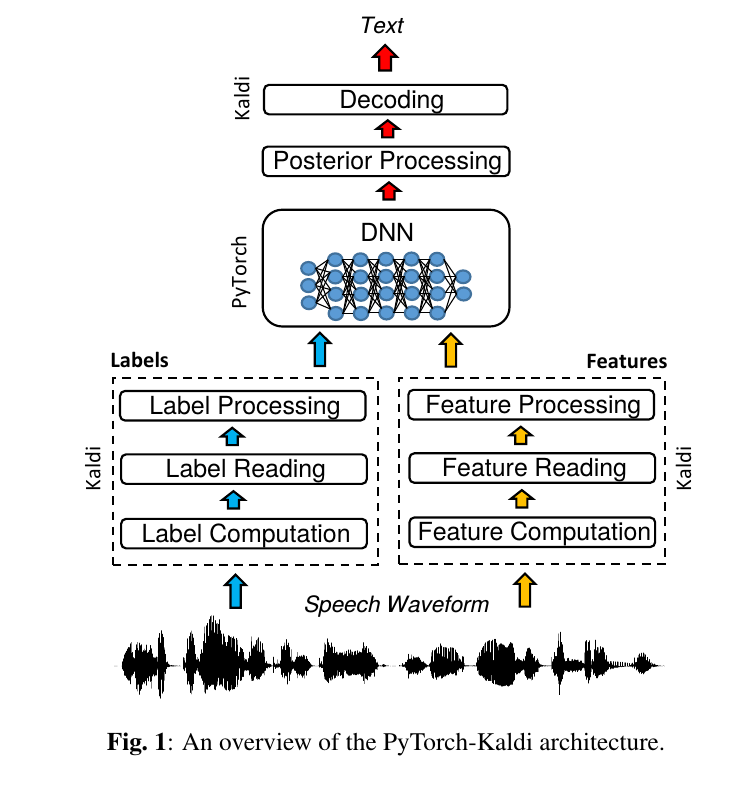
图:PyTorch-Kaldi架构
简介
PyTorch-Kaldi 的目的是作为 Kaldi 和 PyTorch 的一个桥梁,它能继承 Kaldi 的高效和 PyTorch 的灵活性。PyTorch-Kaldi 并不只是这两个工具的粘合剂,而且它还提供了用于构建现代语音识别系统的很多有用特性。比如,代码可以很容易的插入用户自定义的声学模型。此外,用户也可以利用预先实现的网络结果,通过简单的配置文件修改就可以实现不同的模型。PyTorch-Kaldi 也支持多个特征 (feature) 和标签 (label) 流的融合,使用复杂的网络结构。 它提供完善的文档并且可以在本地或者HPC集群上运行。
下面是最新版本的一些特性:
- 使用 Kaldi 的简单接口
- 容易插入 (plug-in) 自定义模型
- 预置许多常见模型,包括 MLP, CNN, RNN, LSTM, GRU, Li-GRU, SincNet
- 基于多种特征、标签和网络结构的复杂模型实现起来非常自然。
- 简单和灵活的配置文件
- 自动从上一次处理的块 (chunk) 恢复并继续训练
- 自动分块 (chunking) 和进行输入的上下文扩展
- 多 GPU 训练
- 可以本地或者在 HPC 机器上运行
- TIMIT 和 Librispeech 数据集的教程
依赖包
Kaldi
我们首先需要安装Kaldi,读者请参考官方文档进行安装和学习Kaldi的基本用法。
安装好了之后需要把Kaldi的相关工具加到环境变量中,比如把下面的内容加到~/.bashrc下并且重新打开终端。1
2
3
4
5
6
7export KALDI_ROOT=/home/lili/codes/kaldi
PATH=$KALDI_ROOT/tools/openfst:$PATH
PATH=$KALDI_ROOT/src/featbin:$PATH
PATH=$KALDI_ROOT/src/gmmbin:$PATH
PATH=$KALDI_ROOT/src/bin:$PATH
PATH=$KALDI_ROOT/src/nnetbin:$PATH
export PATH
读者需要把 KALDI_ROOT 设置成 kaldi 的根目录。如果运行 copy-feats 能出现帮助文档,则说明安装成功。
PyTorch
目前 PyTorch-Kaldi 在 PyTorch1.0 和 0.4 做过测试,因此建议安装这两个版本的,为了提高效率,如果有 GPU 的话一定要安装 GPU 版本的 PyTorch。
要保证 PyTorch 和 cuda 版本相兼容。根据经验,PyTorch 版本过新会导致 cuda 不兼容而报错。参考 PyTorch 版本管理。@Baileyswu
PyTorch-Kaldi
使用下面的代码进行安装,建议使用 virtualenv 来构建一个干净隔离的环境。
1
2
git clone https://github.com/mravanelli/pytorch-kaldi
pip install -r requirements.txt
1 | git clone https://github.com/mravanelli/pytorch-kaldi |
TIMIT教程
获取数据
数据可以在这里获取。
使用Kaldi进行训练
原理回顾
Kaldi 是传统的 HMM-GMM,我们希望用神经网络来替代其中的 GMM 声学模型部分。声学模型可以认为是计算概率 $P(X \vert q)$,这里 q 表示HMM 的状态,而 X 是观测(比如 MFCC 特征),但是神经网络是区分性 (discriminative) 模型,它只能计算 $P(q \vert X)$,也就是给定观察,我们可以计算它属于某个状态的概率,也就是进行分类。当然,根据贝叶斯公式:
因为 P(X) 是固定的,大家都一样,所以可以忽略。但是我们还是需要除以每个状态的先验概率 $P(q)$,这个先验概率可以从训练数据中统计出来。
那现在的问题是怎么获得训练数据,因为语音识别的训练数据是一个句子 (utterance) 的录音和对应的文字。状态是我们引入 HMM 模型的一个假设,世界上并没有一个实在的物体叫 HMM 状态。因此我们需要先训练 HMM-GMM 模型,通过强制对齐 (Force-Alignment) 算法让模型标注出最可能的状态序列。对齐后就有了状态和观察的对应关系,从而可以训练 HMM-DNN 模型了,Kaldi 中的 HMM-GMM 模型也是这样的原理。我们这里可以用 PyTorch-Kaldi 替代 Kaldi 自带的 DNN 模型,从而可以引入更加复杂的神经网络模型,而且实验起来速度更快,比较 PyTorch 是专门的神经网络框架,要实现一个新的网络结构非常简单。相比之下要在 Kaldi 里用 C++ 代码实现新的神经网络就复杂和低效(这里指的是开发效率,但是运行效率也可能是 PyTorch 更快,但是这个只是我的猜测)。当然我们也可以先训练 HMM-DNN,然后用 HMM-DNN 来进行强制对齐,因为 HMM-DNN 要比 HMM-GMM 的效果好,因此它的对齐也是更加准确。
Kaldi训练
原理清楚了,下面我们来进行 Kaldi 的训练,但是训练前我们需要修改几个脚本。
读者如果有TIMIT数据集,在运行前需要修改一些脚本里的路径,下面是作者的修改,供参考。
首先需要修改cmd.sh,因为我是使用单机训练,所以需要把queue.pl改成run.pl。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17lili@lili-Precision-7720:~/codes/kaldi/egs/timit/s5$ git diff cmd.sh
diff --git a/egs/timit/s5/cmd.sh b/egs/timit/s5/cmd.sh
index 6c6dc88..7e3d909 100644
--- a/egs/timit/s5/cmd.sh
+++ b/egs/timit/s5/cmd.sh
@@ -10,10 +10,10 @@
# conf/queue.conf in http://kaldi-asr.org/doc/queue.html for more information,
# or search for the string 'default_config' in utils/queue.pl or utils/slurm.pl.
-export train_cmd="queue.pl --mem 4G"
-export decode_cmd="queue.pl --mem 4G"
+export train_cmd="run.pl --mem 4G"
+export decode_cmd="run.pl --mem 4G"
# the use of cuda_cmd is deprecated, used only in 'nnet1',
-export cuda_cmd="queue.pl --gpu 1"
+export cuda_cmd="run.pl --gpu 1"
接着修改修改 run.sh 里的数据路径 timit 变量修改成你自己的路径,另外我的机器CPU也不够多,因此把 train_nj 改小一点。
1 | lili@lili-Precision-7720:~/codes/kaldi/egs/timit/s5$ git diff run.sh |
最后我们开始训练:1
2
3cd kaldi/egs/timit/s5
./run.sh
./local/nnet/run_dnn.sh
强制对齐
我们有两种选择,第一种使用 HMM-GMM 的对齐来训练 PyTorch-Kaldi,对于这种方式,训练数据已经对齐过了(因为训练 HMM-DNN 就需要对齐),所以只需要对开发集和测试集再进行对齐:1
2
3cd kaldi/egs/timit/s5
steps/align_fmllr.sh --nj 4 data/dev data/lang exp/tri3 exp/tri3_ali_dev
steps/align_fmllr.sh --nj 4 data/test data/lang exp/tri3 exp/tri3_ali_test
但是更好的是使用 HMM-DNN 来做对齐,作者使用的是这种方式,这就需要对训练集再做一次对齐了,因为之前的对齐是 HMM-GMM 做的,不是我们需要的。1
2
3steps/nnet/align.sh --nj 4 data-fmllr-tri3/train data/lang exp/dnn4_pretrain-dbn_dnn exp/dnn4_pretrain-dbn_dnn_ali
steps/nnet/align.sh --nj 4 data-fmllr-tri3/dev data/lang exp/dnn4_pretrain-dbn_dnn exp/dnn4_pretrain-dbn_dnn_ali_dev
steps/nnet/align.sh --nj 4 data-fmllr-tri3/test data/lang exp/dnn4_pretrain-dbn_dnn exp/dnn4_pretrain-dbn_dnn_ali_test
修改PyTorch-Kaldi的配置
我们这里只介绍最简单的全连接网络(基本等价与 Kaldi 里的 DNN),这个配置文件在 PyTorch-Kaldi 根目录下,位置是 cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg。从这个文件名我们可以猜测出这是使用 MFCC 特征的 MLP 模型,此外 cfg/TIMIT_baselines 目录下还有很多其它的模型。这个我们需要修改其中对齐后的目录等数据,请读者参考作者的修改进行修改。
1 | diff --git a/cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg b/cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg |
看起来有点长,其实读者只需要搜索/home/mirco/kaldi-trunk,然后都替换成你自己的kaldi的root路径就行。注意:这里一定要用绝对路径而不能是~/这种。
这个配置文件后面我们再解释其含义。
训练
1 | python run_exp.py cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg |
训练完成后会在目录 exp/TIMIT_MLP_basic/ 下产生如下文件/目录:
- res.res
每个 Epoch 在训练集和验证集上的 loss 和 error 以及最后测试的词错误率 (WER)。作者训练后得到的词错误率是 18%,每次训练因为随机初始化不同会有一点偏差。1
2
3
4
5
6
7
8
9
10lili@lili-Precision-7720:~/codes/pytorch-kaldi$ tail exp/TIMIT_MLP_basic/res.res
ep=16 tr=['TIMIT_tr'] loss=1.034 err=0.324 valid=TIMIT_dev loss=1.708 err=0.459 lr_architecture1=0.04 time(s)=43
ep=17 tr=['TIMIT_tr'] loss=0.998 err=0.315 valid=TIMIT_dev loss=1.716 err=0.458 lr_architecture1=0.04 time(s)=42
ep=18 tr=['TIMIT_tr'] loss=0.980 err=0.309 valid=TIMIT_dev loss=1.727 err=0.458 lr_architecture1=0.04 time(s)=42
ep=19 tr=['TIMIT_tr'] loss=0.964 err=0.306 valid=TIMIT_dev loss=1.733 err=0.457 lr_architecture1=0.04 time(s)=43
ep=20 tr=['TIMIT_tr'] loss=0.950 err=0.302 valid=TIMIT_dev loss=1.744 err=0.458 lr_architecture1=0.04 time(s)=45
ep=21 tr=['TIMIT_tr'] loss=0.908 err=0.290 valid=TIMIT_dev loss=1.722 err=0.452 lr_architecture1=0.02 time(s)=45
ep=22 tr=['TIMIT_tr'] loss=0.888 err=0.284 valid=TIMIT_dev loss=1.735 err=0.453 lr_architecture1=0.02 time(s)=44
ep=23 tr=['TIMIT_tr'] loss=0.864 err=0.277 valid=TIMIT_dev loss=1.719 err=0.450 lr_architecture1=0.01 time(s)=44
%WER 18.0 | 192 7215 | 84.9 11.4 3.6 2.9 18.0 99.5 | -1.324 | /home/lili/codes/pytorch-kaldi/exp/TIMIT_MLP_basic/decode_TIMIT_test_out_dnn1/score_4/ctm_39phn.filt.sys
- log.log
日志,包括错误和警告信息。如果出现问题,可以首先看看这个文件。
- conf.cfg
配置的一个拷贝
- model.svg
网络的结构图,如下图所示:

图:网络的结构图
- exp_files目录
这个目录包含很多文件,用于描述每一个 Epoch 的训练详细信息。比如后缀为 .info 的文件说明块 (chunk) 的信息,后面我们会介绍什么叫块。.cfg 是每个快的配置信息。.lst 列举这个块使用的特征文件。
generated_outputs目录
包括训练和验证的准确率和 loss 随 epoch 的变化,比如 loss 如下图所示: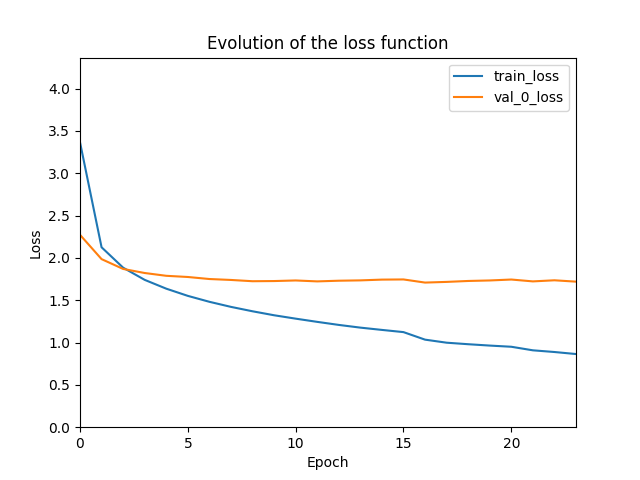
图:训练过程中loss的变化图
使用其它特征
如果需要使用其它特征,比如 Filter Bank 特征,我们需要做如下的修改然后重新进行 Kalid 的训练。我们需要找到 KALDI_ROOT/egs/timit/s5/run.sh 然后把
1 | mfccdir=mfcc |
改成:1
2
3
4
5
6feadir=fbank
for x in train dev test; do
steps/make_fbank.sh --cmd "$train_cmd" --nj $feats_nj data/$x exp/make_fbank/$x $feadir
steps/compute_cmvn_stats.sh data/$x exp/make_fbank/$x $feadir
done
接着修改 Pytorch-Kaldi 的配置(比如 cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg),把 fea_lst 改成fbank特征的路径。
如果需要使用 fmllr 特征(使用了说话人自适应技术),那么前面完整的 kaldi 脚本已经提取过了这个特征,因此不需要再次提取。如果没有运行完整的脚本,需要完整的运行它一次。
使用其它模型
在 cfg/TIMIT_baselines/ 目录下还有很多模型,比如 CNN、LSTM和GRU 等,这里就不介绍了。
实验结果
在 TIMIT 数据集上使用不同方法的实验结果如下表所示。
| Model | mfcc | fbank | fMLLR |
|---|---|---|---|
| Kaldi DNN Baseline | ——- | ——— | 18.5 |
| MLP | 18.2 | 18.7 | 16.7 |
| RNN | 17.7 | 17.2 | 15.9 |
| SRU | ——- | 16.6 | ——- |
| LSTM | 15.1 | 14.3 | 14.5 |
| GRU | 16.0 | 15.2 | 14.9 |
| li-GRU | 15.5 | 14.9 | 14.2 |
从上表可以看出,fMLLR 比 mfcc 和 fbank 的特征效果要好,因为它使用了说话人自适应 (Speaker Adaptation) 的技术。从模型的角度来看 LSTM、GRU 比 MLP 要好,而 Li-GRU 模型比它们还要更好一点。
如果把三个特征都融合起来,使用Li-GRU可以得到更好的结果,词错误率是13.8%。感兴趣的读者可以参考 cfg/TIMI_baselines/TIMIT_mfcc_fbank_fmllr_liGRU_best.cfg。
Librispeech教程
官网还提供了Librispeech教程,这个数据集是免费的,读者可以在这里下载。由于磁盘空间限制,之前我下载和训练过的Librispeech数据都删除了,所以我没有用PyTorch-Kaldi跑过,因此也就不介绍了。
但是原理都差不多,感兴趣的读者请参考官网教程。
PyTorch-Kaldi的工作过程
最重要的是 run_exp.py 文件,它用来执行训练、验证、forward 和解码。训练会分成很多个 Epoch,一个 Epoch 训练完成后会在验证集上进行验证。训练结束后会执行 forward,也就是在测试数据集上根据输入特征计算后验概率 $p(q \vert X)$,这里 X 是特征(比如 mfcc)。但是为了在 HMM 里使用,我们需要似然概率 $p(X \vert q)$,因此我们还需要除以先验概率 $p(q)$。最后使用 Kaldi 来解码,输出最终的文本。注意:特征提取是Kaldi完成,前面已经做过了(包括测试集),而计算似然 $p(X \vert q)$ 是 PyTorch-Kaldi 来完成的,最后的解码又是由 Kaldi 来做的。
run_exp.py 的输入是一个配置文件(比如我们前面用到的TIMIT_MLP_mfcc_basic.cfg),这个配置文件包含了训练神经网络的所有参数。因为训练数据可能很大,PyTorch-Kaldi 会把整个数据集划分成更小的块 (chunk),以便能够放到内存里训练。run_exp.py 会调用run_nn 函数(在 core.py 里)来训练一个块的数据,run_nn 函数也需要一个类似的配置文件(比如 exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.cfg )。这个文件里会指明训练哪些数据(比如 fea_lst=exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1_mfcc.lst),同时训练结果比如 loss 等信息也会输出到 info 文件里(比如 exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.info)。
比如作者训练时 exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1_mfcc.lst 的内容如下:
1 | $ head exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1_mfcc.lst |
exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.info 的内容如下:
1
2
3
4
5
6
$ cat exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.info
[results]
loss=3.6573577
err=0.7678323
elapsed_time_chunk=8.613296
1 | $ cat exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.info |
配置文件
这里有两种配置文件:全局的配置文件(比如cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg)和块的配置文件(比如exp/TIMIT_MLP_basic/exp_files/train_TIMIT_tr_ep00_ck1.cfg)。它们都是ini文件,使用configparser库来parse。全局配置文件包含很多节(section,在ini文件里用[section-name]开始一个section),它说明了训练、验证、forward和解码的过程。块配置文件和全局配置文件很类似,我们先介绍全局配置文件,这里以cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg为例。
cfg_proto
1 | [cfg_proto] |
cfg_proto节指明全局配置文件和块配置文件的结构,我们看一下proto/global.proto
1 | [cfg_proto] |
这个 global.proto 可以认为定义了 TIMIT_MLP_mfcc_basic.cfg 的结构 (schema)。比如它定义了 cfg_proto 节有两个配置项:cfg_proto 和 cfg_proto_chunk,它们的值是 path(路径)。因此我们在 TIMIT_MLP_mfcc_basic.cfg 的 cfg_proto 节只能配置 cfg_proto 和 cfg_proto_chunk。
类似的,global.proto 定义了 exp 节包含 cmd,它是一个字符串;seed,它是一个负无穷(-inf)到无穷(inf)的整数;N_epochs_tr,它是一个1到无穷的整数。
因此我们可以在 TIMIT_MLP_mfcc_basic.cfg 里做如下定义:
1 | [exp] |
exp 节是实验的一些全局配置。这些配置的含义我们大致可以猜测出来:cmd是分布式训练时的脚本,我们这里设置为空即可;run_nn_script 是块的训练函数,这里是 run_nn(core.py);out_folder 是实验的输出目录;seed 是随机种子;use_cuda 是否使用 CUDA;multi-gpu 表示是否多 GPU 训练;n_epochs_tr 表示训练的 epoch 数。
我们这里需要修改的一般就是 use_cuda,如果没有 GPU 则需要把它改成False。下面我们只介绍 TIMIT_MLP_mfcc_basic.cfg 的各个节,它的结构就不介绍了。
dataset
dataset 用于配置数据,我们这里配置训练、验证和测试3个数据集,分别用 dataset1、dataset2 和 dataset3 表示:
1 | [dataset1] |
每个 dataset 有一个名字,比如 TIMIT_tr。接下来是 fea,它用来配置特征(神经网络的输入),这个配置又有很多子配置项。fea_name 给它起个名字。而 fea_lst 表示特征 scp 文件。它指明每个 utterance 对应的特征在 ark 文件里的位置,不熟悉的读者请参考 Kaldi 文档或者本书前面的内容。fea_opts 表示对原始的特征文件执行的一些命令,比如 apply-cmvn 表示对原始的 MFCC 特征进行均值和方差的归一化。cw_left 和 cw_right=5 表示除了当前帧,我们还使用左右各 5 帧也就是共 11 帧的特征来预测。使用当前帧左右的数据这对于MLP来说是很有效的,但是对于 LSTM 或者 GRU 来说是不必要的,比如在 cfg/TIMIT_baselines/TIMIT_LSTM_mfcc.cfg 里 cw_left=0。
而 lab 用来配置标签(上下文相关因子是 PyTorch-Kaldi 的输出),它也有很多子配置项。lab_name 是名字,lab_folder 指定对齐结果的目录。 “lab_opts=ali-to-pdf” 表示使用标准的上下文相关的因子表示(cd phone,contextual dependent phone);如果我们不想考虑上下文(训练数据很少的时候)可以使用 “lab_opts=ali-to-phones --per-frame=true“。lab_count_file 是用于指定因子的先验概率的文件,auto 让 PyTorch-Kaldi 自己去计算。lab_data_folder 指明数据的位置,注意它是 kaldi 数据的位置,而不是 PyTorch-Kaldi 的数据。
因为训练数据通常很大,不能全部放到内存里,因此我们需要用 n_chunks 把所有数据切分成 n_chunks 个块。这里因为 TIMIT 不大,所以只需要分成 5 个块。而验证和测试的时候数据量不大,所以 n_chunks=1,也就是全部放到内存。如果我们看 Librispeech 的配置,因为它的数据比较大,所以它配置成 N_chunks=50。
通常我们让一个块包含 1 到 2 个小时的语音数据。
data_use
1 | [data_use] |
data_use 指定训练、验证和 forward (其实就是测试)使用的数据集的名字,TIMIT_tr、TIMIT_dev 和 TIMIT_test 就是我们之前在dataset里定义的。
batches
1 | batch_size_train = 128 |
batch_size_train 指定训练的 batch 大小。max_seq_length_train 配置最大的句子长度,如果太长,LSTM 等模型可能会内存不足从而出现OOM的问题。我们也可以逐步增加句子的长度,先让模型学习比较短的上下文,然后逐步增加长度。如果这样,我们可以设置 increase_seq_length_train 为 True,这个时候第一个 epoch 的最大长度会设置成 start_seq_len_train (100),然后第二个 epoch 设置成 start_seq_len_train * multply_factor_seq_len_train(200),……,直到 max_seq_length_train。这样的好处是先学习比较短的上下文,然后学习较长的上下文依赖。实验发现这种策略可以提高模型的学习效率。
类似的 batch_size_valid 和 max_seq_length_valid 指定验证集的batch大小和最大句子长度。
architecture
1 | [architecture1] |
architecture 定义神经网络模型(的超参数)。arch_name 就是起一个名字,后面会用到。
arch_proto 指定网络结构的定义 (schema) 为文件 proto/MLP.proto。因为不同的神经网络需要不同的配置,所以这里还需要通过arch_proto 引入不同网络的配置。而 global.proto 里只定义所有网络模型都会用到的配置,这些配置都是以 arch_ 开头。我们先看这些 arch_ 开头的配置,然后再看 MLP.proto 新引入的与特定网络相关的配置(MLP.proto 里的配置都是 dnn_ 开头)。
- arch_name 名字
- arch_proto 具体的网络proto路径
arch_library 实现这个网络的Python类所在的文件
比如MLP类是在neural_networks.py里实现的。
arch_class 实现这个网络的类(PyTorch 的 nn.Module的子类),这里是MLP。
注意:
neural_networks.py除了实现 MLP 还实现其它网络结果比如 LSTM。arch_library 和 arch_class 就告诉了 PyTorch 使用那个模块的哪个类来定义神经网络。arch_pretrain_file 用于指定之前预训练的模型的路径
比如我先训练一个两层的MLP,然后再训练三层的时候可以使用之前的参数作为初始值。
- arch_freeze 训练模型时是否固定(freeze)参数
这看起来似乎没什么用,毕竟我们训练模型不就是为了调整参数吗?我也不是特别明白,也许是多个模型融合时我们可以先固定一个然后训练另一个?或者是我们固定预训练的arch_pretrain_file中的参数,只训练后面新加的模型的参数?
arch_seq_model 是否序列模型
这个参数告诉 PyTorch 你的模型是否序列模型,如果是多个模型的融合的话,只要有一个序列模型(比如 LSTM),那么整个模型都是序列模型。如果不是序列模型的话,给神经网络的训练数据就不用给一个序列,这样它可以随机的打散一个句子的多个因子,从而每次训练这个句子都不太一样,这样效果会更好一点。但是如果是序列模型,那么给定的句子就必须是真正的序列。
arch_lr learning rate
arch_halving_factor 0.5
如果当前 epoch 比前一个 epoch 在验证集上的提高小于arch_improvement_threshold,则把 learning rate 乘以arch_halving_factor(0.5),也就是减小 learning rate。
arch_improvement_threshold
参考上面的说明。
arch_opt sgd 优化算法
接下来的 opt_ 开头的参数是 sgd 的一些子配置,它的定义在 proto/sgd.proto。不同的优化算法有不同的子配置项目,比如 proto/sgd.proto如下:1
2
3
4
5[proto]
opt_momentum=float(0,inf)
opt_weight_decay=float(0,inf)
opt_dampening=float(0,inf)
opt_nesterov=bool
从名字我们可以猜测,opt_momentum 是冲量的大小,我们这里配置是 0,因此就是没有冲量的最普通的 sgd。opt_weight_decay 是 weight_decay 的权重。opt_nesterov 说明是否 nesterov 冲量。opt_dampening 我不知道是什么,我只搜索到这个ISSUE,似乎是一个需要废弃的东西,sgd的文档好像也能看到 dampening。关于优化算法,读者可以参考基础篇或者参考cs231n的note
看完了通用的 architecture 配置,我们再来看 MLP.proto 里的具体的网络配置:
1 | dnn_lay = 1024,1024,1024,1024,N_out_lab_cd |
我们可以从名字中猜测出来它们的含义(如果猜不出来就只能看源代码了,位置在 neural_networks.py 的MLP类)。dnn_lay 定义了5个全连接层,前4层的隐单元个数是1024,而最后一层的个数是一个特殊的 N_out_lab_cd,它表示上下文相关的因子的数量,也就是分类器的分类个数。dnn_drop 表示这 5 层的 dropout。dnn_use_laynorm_inp 表示是否对输入进行 layernorm,dnn_use_batchnorm_inp 表示是否对输入进行batchnorm。dnn_use_batchnorm 表示对 5 个全连接层是否使用 batchnorm。dnn_use_laynorm 表示对5个全连接层是否使用 layernorm。dnn_act表示每一层的激活函数,除了最后一层是 softmax,前面 4 层都是 relu。
model
1 | [model] |
model 定义输出和损失函数,out_dnn1=compute(MLP_layers,mfcc) 的意思是把 mfcc 特征(前面的section定义过)输入 MLP_layers1(前面定义的architecture),从而计算出分类的概率(softmax),把它记为 out_dnn1,然后用 out_dnn1 和 lab_cd 计算交叉熵损失函数 (cost_nll),同时也计算错误率 (cost_err)。当然这个配置文件的 model 比较简单,我们看一个比较复杂的例子 (cfg/TIMIT_baselines/TIMIT_mfcc_fbank_fmllr_liGRU_best.cfg):1
2
3
4
5
6
7
8
9
10
11
12
13
14[model]
model_proto=proto/model.proto
model:conc1=concatenate(mfcc,fbank)
conc2=concatenate(conc1,fmllr)
out_dnn1=compute(MLP_layers_first,conc2)
out_dnn2=compute(liGRU_layers,out_dnn1)
out_dnn3=compute(MLP_layers_second,out_dnn2)
out_dnn4=compute(MLP_layers_last,out_dnn3)
out_dnn5=compute(MLP_layers_last2,out_dnn3)
loss_mono=cost_nll(out_dnn5,lab_mono)
loss_mono_w=mult_constant(loss_mono,1.0)
loss_cd=cost_nll(out_dnn4,lab_cd)
loss_final=sum(loss_cd,loss_mono_w)
err_final=cost_err(out_dnn4,lab_cd)
在上面的例子里,我们把 mfcc、fbank 和 fmllr 特征拼接成一个大的特征,然后使用一个 MLP_layers_first(这是一个全连接层),然后再使用 liGRU(liGRU_layers),然后再加一个全连接层得到 out_dnn3。out_dnn3 再用 MLP_layers_last 得到上下文相关因子的分类(MLP_layers_last 的输出是 N_out_lab_cd);out_dnn 用 out_dnn4 得到上下文无关的因子分类(MLP_layers_last2 的输出是 N_out_lab_mono)。最后计算两个 loss_mono 和 loss_cd 然后把它们加权求和起来得到 loss_final。
forward
1 | [forward] |
forward 定义 forward 过程的参数,首先通过 forward_out 指定输出是 out_dnn1,也就是 softmax 分类概率的输出。normalize_posteriors 为 True 说明要把后验概率归一化成似然概率。normalize_with_counts_from 指定 lab_cd,这是在前面的 dataset3 里定义的 lab_name。
save_out_file 为 False 说明后验概率文件不用时会删掉,如果调试的话可以设置为 True。require_decoding 指定是否需要对输出进行解码,我们这里是需要的。
decoding
1 | [decoding] |
decoding 设置解码器的参数,我们这里就不解释了,读者可以参考 Kaldi的文档或者本书前面介绍的相关内容。
块配置文件
块配置文件和全局配置文件非常类似,它是 run_nn 在训练一个块的数据时的配置,它有一个配置 to_do={train, valid, forward},用来说明当前的配置是训练、验证还是 forward(测试)。
自己用PyTorch实现神经网络(声学模型)
我们可以参考 neural_networks.py 的 MLP 实现自己的网络模型。
创建proto文件
比如创建 proto/myDNN.proto,在这里定义模型的超参数。我们可以参考 MLP.proto,它的内容如下(前面介绍过了):1
2
3
4
5
6
7
8[proto]
dnn_lay=str_list
dnn_drop=float_list(0.0,1.0)
dnn_use_laynorm_inp=bool
dnn_use_batchnorm_inp=bool
dnn_use_batchnorm=bool_list
dnn_use_laynorm=bool_list
dnn_act=str_list
dnn_lay 是一个字符串的 list,用逗号分开,比如我们前面的配置:dnn_lay = 1024,1024,1024,1024,N_out_lab_cd。其余的类似。bool 表示取值只能是 True 或者 False。float_list(0.0,1.0) 表示这是一个浮点数的 list,并且每一个值的范围都是必须在 (0, 1) 之间。
实现
我们可以参考 neural_networks.py 的 MLP 类。我们需要实现 __init__ 和 forward 两个方法。__init__ 有两个参数:options 表示参数,也就是 PyTorch-Kaldi 自动从前面的配置文件里提取的参数,比如 dnn_lay 等;另一个参数是 inp_dim,表示输入的大小(不包含 batch 维)。
我们下面来简单的看一下MLP是怎么实现的。
__init__
1 | class MLP(nn.Module): |
代码很长,但是其实很简单,首先从 options 里提取一些参数,比如self.dnn_lay=list(map(int, options['dnn_lay'].split(','))),就可以知道每一层的大小。
然后是根据每一层的配置分别构造线性层、BatchNorm、LayerNorm、激活函数和 Dropout,保存到 self.wx、self.bn、self.ln、self.act 和 self.drop这 5 个 nn.ModuleList里。
forward
1 | def forward(self, x): |
forward 就用前面定义的 Module 来计算,代码非常简单。不熟悉 PyTorch 的读者可以参考官方文档。
在配置文件里使用我们自定义的网络
我们这里假设 myDNN 的实现和 MLP 完全一样,那么配置也是类似的,我们可以基于 cfg/TIMIT_baselines/TIMIT_MLP_mfcc_basic.cfg 进行简单的修改:
1 | [architecture1] |
其余的配置都不变就行了,我们把这个文件另存为 cfg/myDNN_exp.cfg。
训练
1 | python run_exp.sh cfg/myDNN_exp.cfg |
如果出现问题,我们首先可以去查看 log.log 的错误信息。
超参数搜索
我们通常需要尝试很多种超参数的组合来获得最好的模型,一种常见的超参数搜索方法就是随机搜索。我们当然可以自己设置各种超参数的组合,但是这比较麻烦,PyTorch-Kaldi 提供工具随机自动生成不同超参数的配置文件,tune_hyperparameters.py 就是用于这个目的。
1 | python tune_hyperparameters.py cfg/TIMIT_MLP_mfcc.cfg exp/TIMIT_MLP_mfcc_tuning 10 arch_lr=randfloat(0.001,0.01) batch_size_train=randint(32,256) dnn_act=choose_str{relu,relu,relu,relu,softmax|tanh,tanh,tanh,tanh,softmax} |
第一个参数 cfg/TIMIT_MLP_mfcc.cfg 是一个参考的”模板”配置,而第二个参数 exp/TIMIT_MLP_mfcc_tuning 是一个目录,用于存放生成的配置文件。
第三个参数 10 表示需要生成 10 个配置文件。后面的参数说明随机哪些配置项。
比如 arch_lr=randfloat(0.001,0.01) 表示 learning rate 用 (0.001, 0.01) 直接均匀分布的随机数产生。
dnn_act=choose_str{relu,relu,relu,relu,softmax\|tanh,tanh,tanh,tanh,softmax} 表示激活函数从”relu,relu,relu,relu,softmax”和”tanh,tanh,tanh,tanh,softmax”里随机选择。
使用自己的数据集
使用自己的数据集可以参考前面的TIMIT或者LibriSpeech示例,我们通常需要如下步骤:
准备Kaldi脚本,请参考Kaldi官方文档。
使用Kaldi对训练、验证和测试数据做强制对齐。
创建一个 PyTorch-Kaldi 的配置文件 cfg_file
训练 python run_exp.sh $cfg_file
使用自定义的特征
PyTorch-Kaldi 支持 Kaldi 的 ark 格式的特征文件,如果想加入自己的特征,需要保存为 ark 格式。读者可以参考 kaldi-io-for-python 来实现怎么把 numpy(特征当然就是一些向量了) 转换成 ark 格式的特征文件。也可以参考 save_raw_fea.py,这个脚本把原始的特征转换成 ark 格式,然后用于后续的神经网络训练。
Batch大小、learning rate和dropout的调度
我们通常需要根据训练的进度动态的调整learning rate等超参数,PyTorch-Kaldi最新版本提供了灵活方便的配置方式,比如:
1 | batch_size_train = 128*12 | 64*10 | 32*2 |
上面配置的意思是训练的时候前12个epoch使用128的batch,然后10个epoch使用大小64的batch,最后两个epoch的batch大小是32。
类似的,我们可以定义 learning rate:1
arch_lr = 0.08*10|0.04*5|0.02*3|0.01*2|0.005*2|0.0025*2
它表示前10个epoch的learning rate是0.08,接下来的5个epoch是0.04,然后用0.02训练3个epoch,……。
dnn的dropout可以如下的方式表示:
1 | dnn_drop = 0.15*12|0.20*12,0.15,0.15*10|0.20*14,0.15,0.0 |
这是用逗号分开配置的 5 个全连接层的 dropout,对于第一层来说,前 12 个 epoch 的 dropout 是 0.15 后 12 个是 0.20。第二层的 dropout 一直是 0.15。第三层的前 10 个 epoch 的 dropout 是 0.15 后 14 个 epoch 是 0.20,……。
不足
目前 PyTorch-Kaldi 最大的问题无法实现 online 的 Decoder,因此只能做 offline 的语音识别。具体细节感兴趣的读者请参考这个ISSUE,可能在未来的版本里会增加online decoding的支持。